On serendipitous synergy in science
Cross-disciplinary efforts offer hope that neurological diseases can be treated more effectively
Interdisciplinary collaboration can generate serendipitous synergy for scientific breakthroughs. A joint team from CUHK and The University of Hong Kong (HKU) has co-developed the world’s first magnetic resonance imaging (MRI)-guided intraoperative robot for bilateral stereotactic neurosurgery, facilitating more accurate and effective treatment of Parkinson’s disease, brain tumours and neuropsychiatric disorders.
Stereotactic neurosurgery involves a technique that can locate targets of surgical interest using an external positioning system, and is widely applied in brain biopsy, tumour ablation, drug delivery and deep brain stimulation (DBS). Like a heart pacemaker, DBS helps to restore normal nerve cell activities by delivering electrical signals through implanted electrodes to deep brain targets.
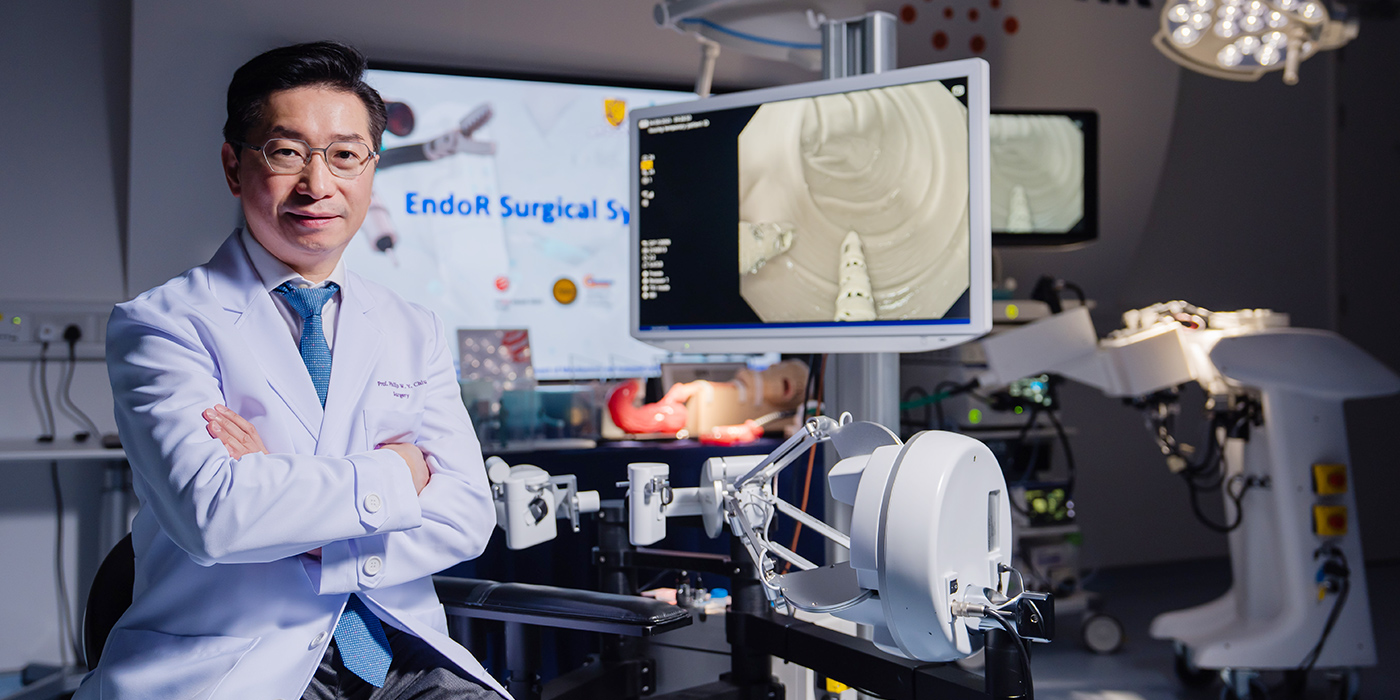
“DBS was introduced to Asia by Professor Poon Wai-sang. In January 1997, we did the first DBS in Asia at the Prince of Wales Hospital,” says Professor Danny Chan, division head of Neurosurgery at CUHK. DBS is highly sophisticated, as surgeons target only the tiny nucleus structures without damaging the surrounding critical tissue. Professor Chan initiated a collaboration with HKU’s medical robotics expert Professor Kwok Ka-wai to develop an “intraoperative roadmap” for surgical precision.
The system was validated through cadaver studies and skull model testing. Initial results have laid a solid foundation for future clinical applications, and have been published in leading international journal Advanced Science.
“The breakthrough wouldn’t have been accelerated without interdisciplinary knowledge exchange between surgeons and biomedical engineering, the contribution of the ‘silent teachers’, as well as the state-of-the-art facilities of the Multi-scale Medical Robotics Center,” Professor Chan says.

Intraoperative updates from a surgical roadmap
Brain operations require high precision due to limited space and the fragility of brain tissue. The brain is likely to shift or shrink after the skull is opened. For better accuracy, conventional DBS is performed on patients while they are awake, under local anesthesia. Surgeons rely on the patient’s verbal or gestural feedback to ensure they accurately implant the electrodes.
To reduce patients’ pain, improve safety and enhance the efficiency of surgery, the joint team has come up with a lightweight compact robot guided by MRI which acts as a surgical roadmap. This results in fewer invasive stereotactic procedures on the patient under general anesthesia, as surgeons can accurately control and evaluate the stereotactic manipulation bilaterally to left and right brain targets in real time. Compared with conventional unilateral surgery, the new method helps reduce the duration of surgery from eight hours to four.
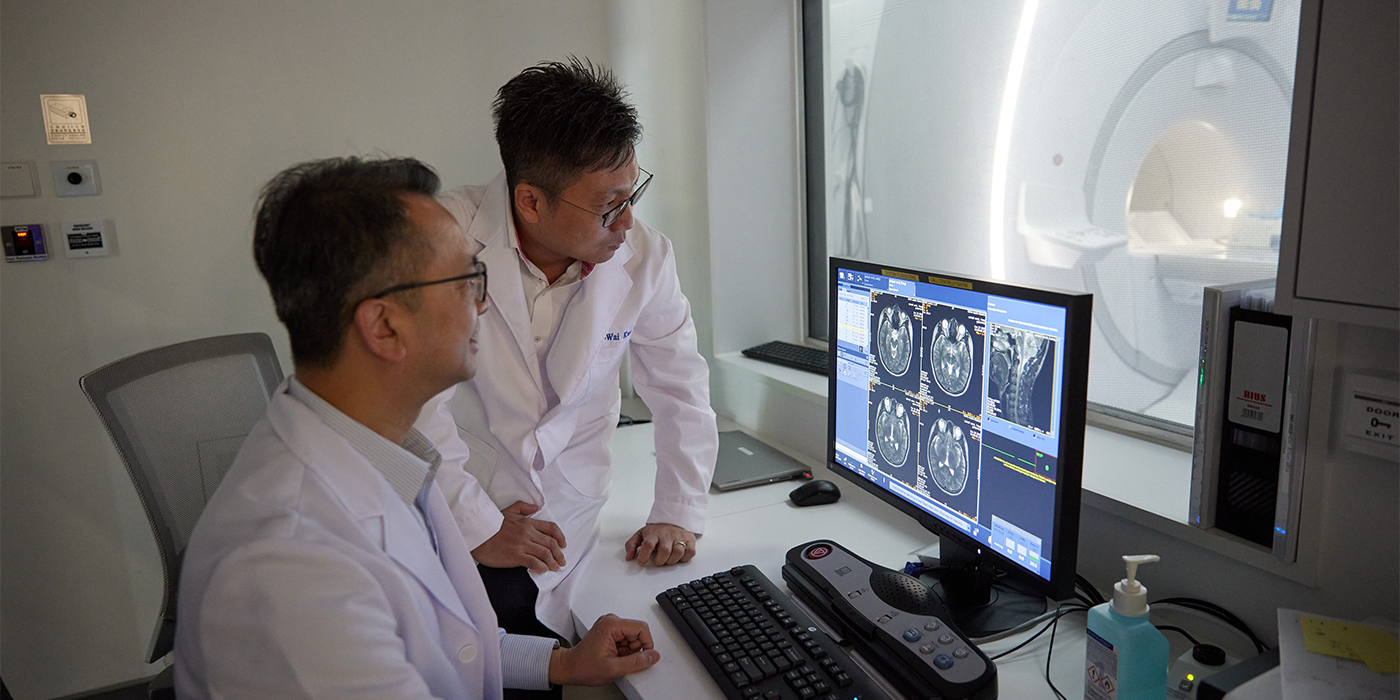
Current intraoperative surgery involves computer tomography (CT) imaging. “Some brain parts, such as the subthalamic nucleus, can only be viewed by MRI, but robots can’t function in an MRI environment.” MRI scanners have very strong magnetic fields and most metallic components are forbidden in MRI environments, including the electromagnetic (EM) motors commonly used in robots. “As a result, I approached Professor Kwok to develop an MRI-guided robot for bilateral stereotactic neurosurgery.”
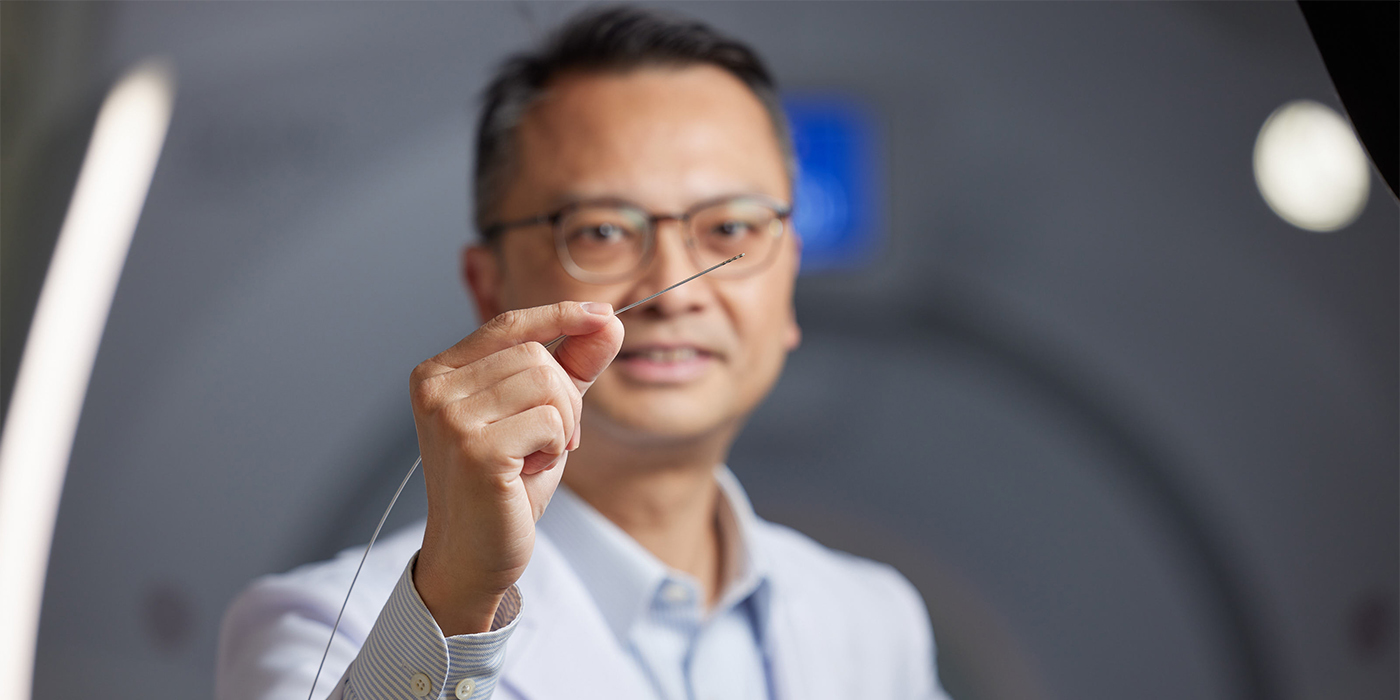
The intraoperative MRI-guided robotic positioner that the joint team has developed is lightweight and compact, allowing manual manipulation with soft robotic fine adjustment. It weighs 203g, with a diameter of 97mm and a height of 81mm, allowing its skull-mounted structure to fit within most standard imaging head coils. It allows for the refinement of medical interventions that involve cannula or needle targeting, like biopsy, injection and DBS.
The robotic positioner is operated in two stages: the neurosurgeon orients the robot instrument towards the direction of the planned trajectory based on pre-operative images, followed by the positioner’s automatic, precise, responsive, high-resolution adjustments. The system’s inbuilt fibre-optic lighting intuitively indicates the angulation error with reference to the planned trajectory. Making use of finite element analysis-based design and optimisation of the fluid-driven soft actuator architecture, the instrument can be positioned accurately, with an orientation error of less than 0.2 degrees. Details of the interactive robotic positioner are illustrated in this graph.
Professor Kwok of HKU’s Department of Mechanical Engineering says: “Across the stages, the system achieves robust orientation locking through soft robotic mechanisms like tendon-driven braking units and granular jamming. It sets the instrument insertion depth with the assistance of a stopper. The surgeon then manually inserts the instrument via the robot instrument guide for biopsy, injection and other interventions. A subsequent MRI can monitor the procedure.”
To allow the system to target accurately, the team has developed custom-made, miniature, wireless, omnidirectional tracking markers that facilitate robot registration under MRI. The entire system is fabricated with MR-safe materials, generating zero electromagnetic interference and allowing the use of intraoperative MRI guidance during robot actuation and to evaluate the interventional process.
The sophistication of the soft robotic mechanisms can be traced to Professor Kwok’s MPhil research at CUHK, during which he developed a robot drawing system that imitates the brush-pen motion of Chinese painting and calligraphy. The system captures and analyses data from a camera beneath the transparent drawing plate in real time, together with projective rectification and video segmentation algorithms.
From dialogue to clinical applications
The interdisciplinary research project represents a stride towards safer, more accurate and efficient brain surgery. “The system can eliminate the intrinsic errors in conventional frame-based stereotaxis, such as frame-precision, image fusion discrepancy and measurement errors. Surgical outcomes can be improved as the insertion precision increases. The shorter operation time will help to improve patient comfort and satisfaction,” Professor Chan explains.
For the invention of the world’s first MRI-guided robot for bilateral surgery, the joint team was conferred the Best Conference Paper Award in the largest international forum for robotics scientists, the IEEE International Conference on Robotics and Automation 2018, held in Australia.
Its joint effort is supported by the Multi-scale Medical Robotics Center (MRC) set up by CUHK at InnoHK. During the system’s preclinical trials, the team made use of the MRI scanning facilities in the MRC, with the prototype going through skull model and cadaver trials to validate its clinical workflow and feasibility in human anatomy. The results showed the robot’s precision to be at the level where errors are less than 3mm. Besides brain surgery, the breakthrough can also be applied to other MRI-guided interventions such as cardiac catheterisation and tissue biopsy.

With MRC as the focal point, robust knowledge exchange with clinical and engineering counterparts from near and afar, such as Prince of Wales Hospital, CUHK’s Department of Biomedical Engineering, University College London and Johns Hopkins University in the United States, brings synergy to the research project.
This interdisciplinary brainchild is ready to be tested for clinical translation. The first intraoperative MRI (iMRI) system in Hong Kong will come into service at Tuen Mun Hospital in the third quarter of 2024. Two or three more iMRI systems will be set up in Hong Kong in the coming five years.
Hong Kong citizens aged over 65 will account for 38% of the population in a decade. Degenerative illnesses like Parkinson’s disease, the second most common such disease after Alzheimer’s, will place a heavy socioeconomic burden on society. This innovative iMRI system that facilitates real-time bilateral stereotactic surgery can address this burning issue in the years to come.
By Jenny Lau
Photos by Keith Hiro