人工智能微型机械人自主游走于精密的人体
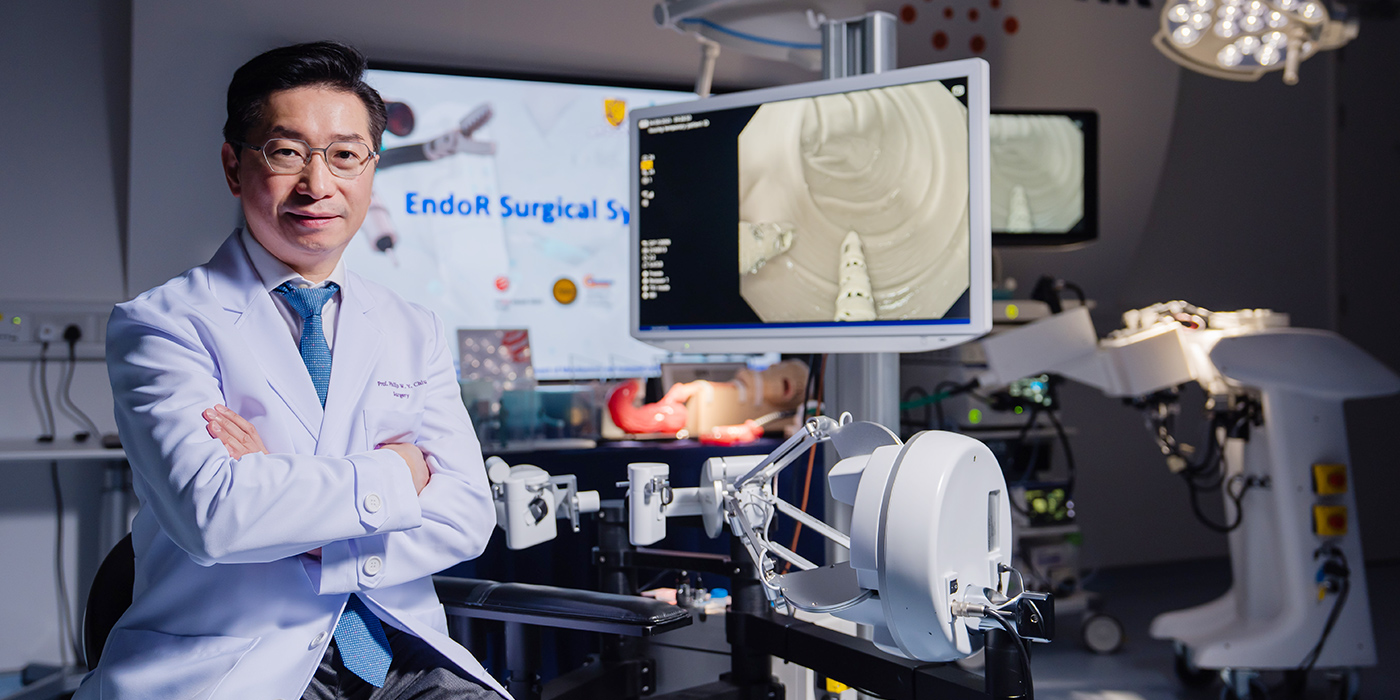
中大工程学院研究团队成功开发一种结合人工智能的微型机械人集群自动导航技术,全球首次让微型机械人拥有如蜜蜂般的智慧,可成群结队在人体内的复杂环境游走,具备自动躲避障碍物的自主巡航能力。研究结果已刊登于国际学术期刊《Nature Machine Intelligence》,有望进一步推动微型机械人在医学上的临床应用。
微型机械人能携带药物进入人体,针对性地治疗位于狭窄腔道或常规方法难以到达部位的病灶。不过,单一个微型机械人的容量和功能有限,要有效输送药物,需要利用外部磁场同时控制数千至数百万个微型机械人成群进入人体执行任务。面对体内复杂多变的环境,例如不同性质的流体及蜿蜒曲折的腔道,亦大大增加了手动控制的难度和失误机会,甚或出现部分机械人不受控制的情况。

机械与自动化工程学系张立教授表示:「蜜蜂、鱼类等自然界生物有着非凡的集群智能,牠们可以根据实际环境共同地改变集群形态,以便穿越狭窄、弯曲的通道,避开障碍物,甚或对敌人展开攻击。虽然微型机械人本体暂时无法装备『大脑』,但我们可以透过人工智能控制系统,赋予微型机械人集群自主巡航能力,令它们可全自动、自主地在人体内进行任务,减少失误机会。」
张立教授与中大计算器科学与工程学系窦琪教授的团队合作,利用深度学习技术和其团队的研究经验和数据,建立了一套人工智能微型机械人操控系统。它透过超声波和X光荧光镜等成像工具作为微型机械人的「眼睛」,侦测前进路径上的障碍物,并实时调整移动方向;系统亦会控制磁场,引导磁性纳米粒子机械人转换集群形态,增加任务的成功机会。
影片A﹕人工智能系统实时调整微型机械人的动作路径
团队在虚拟人体胎盘环境中测试了人工智能操控下,微型机械人集群的自主巡航能力,结果显示系统在人体复杂的血管网络环境中亦能有效运作。
影片B﹕微型机械人集群成功穿梭复杂的网络到达目的地
研究团队按照不同情境,将微型机械人集群的自主程度分为5个级别(由0级至4级;0代表手动控制、4代表完全自主),并列出每一个自主等级的硬件装置要求,作为日后微型机械人自动化研究的基础。例如第1级适用于静止环境,只需要配备磁场控制系统和成像系统;而第4级可用于动态环境,且毋须人手介入便能完成任务,例如输送药物到指定部位,但硬件上则需要配备回馈信息处理系统和人工智能控制系统等。
张立教授期望,自动导航系统日后可让医生在毋须接受特别操作培训下,亦能利用微型机械人治疗病人,例如将标靶药物直接输送到病灶。
这项研究得到研究资助局、香港特别行政区创新科技署、周玉浩创新医学技术中心、中大天石机器人研究所、中大信兴高等工程研究所、InnoHK 医疗机械人创新技术中心、中大—中国科学院深圳先进技术研究院机器人与智能系统联合实验室支持。
研究论文全文:Autonomous environment-adaptive microrobot swarm navigation enabled by deep learning-based real-time distribution planning https://www.nature.com/articles/s42256-022-00482-8
影片来源:Autonomous environment-adaptive microrobot swarm navigation enabled by deep learning-based real-time distribution planning, Nature Machine Intelligence, Vol. 4, pages 480–493 (2022)